
Jun 2014 - Jun 2022
Joined the Aerospace Electronics Laboratory at Hanoi University of Science and Technology (HUST) as Research Assistant and UAV Team Lead (Aug 2014 - Jan 2022). Led research on stability and control algorithms for various aerial vehicle configurations, and mentored junior researchers on aerial systems, embedded development, and scientific writing.
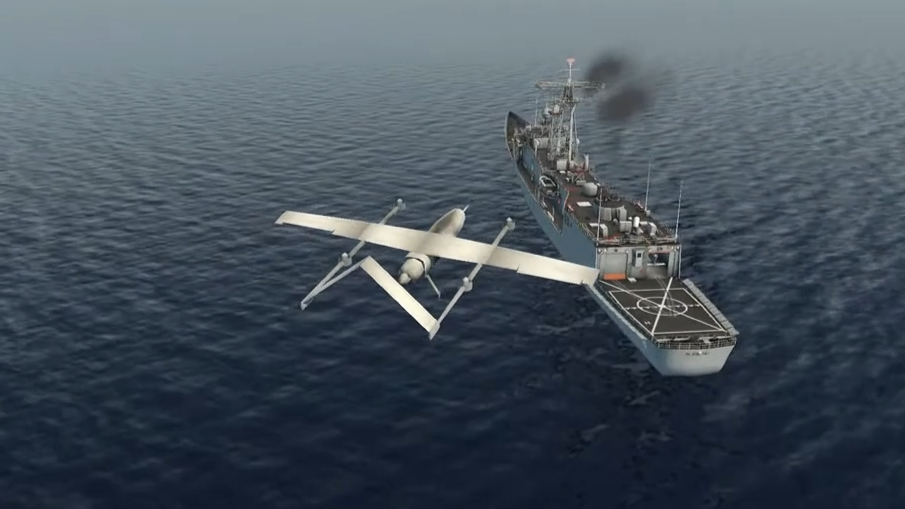
Built open-source real-time simulation systems based on MATLAB/Simulink for multirotor aerial vehicles and X-Plane/Ardupilot for VTOL QuadPlane with autonomous precision landing on moving platforms.
2019 - Autonomous landing on a moving ship | VTOL QuadPlane
2017 - Inverted V-tail fixed-wing UAV | Flight control algorithm
Created modelling and flight control algorithms for an inverted V-tail fixed-wing UAV.



2015 - Real-time 3D simulator based on MATLAB/Simulink for multirotor
2016 - IoT-SCADA System
Designed and built a lightweight IoT-SCADA system supporting monitoring and control of multiple devices concurrently via the internet, easy to deploy, customisable for various applications, and ready for expansion or upgrade.
- Easy compatibility with industrial IoT communication standards: MQTT, ZigBee, WiFi, LoRa, LiFi
- Support for multi-platform, multi-device front-end
- Real-time system response with low latency
- Back-end supporting upgrades and expansion