
Experience
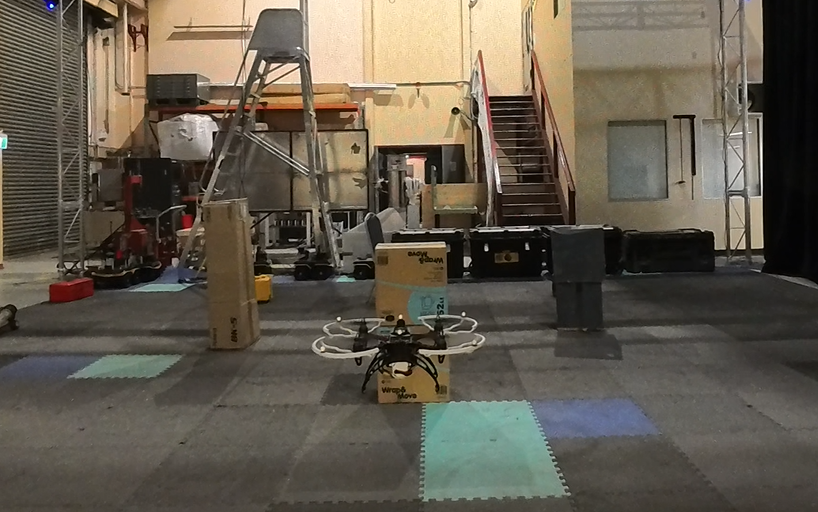
Developing a Vision-Language Model (VLM) guided autonomous navigation framework with deterministic safety guarantees. The system enables a quadrotor to fly to semantic goals inferred from natural language commands, for example, “Fly to the green barrel!”, while navigating safely through cluttered environments.

Leading system development for a decentralised drone swarm framework for Defence applications at UNSW Canberra, with end-to-end responsibility from architecture through integration, testing, deployment, and handover to industry stakeholders.

Named following the same principle as its aerial sibling Brotor, Brover (combining “Bro” for Brother and “rover”) is a ground robot designed with commercial applications in mind.

Led end-to-end architecture for a multi-sensor tracking system to protect koalas during forestry operations in Victoria, owning system design and cross-discipline integration across mechanical, electrical, and software teams, from specification through field qualification.

Developing mission-critical flight software for production autonomous drone platforms (1.6M+ items delivered, 6.0M+ people served globally) on Embedded Linux at Swoop Aero, within an Agile development team with rapid iterative development and rigorous validation standards for deployment readiness.

A personal hobby project developed in the X-Plane flight simulation platform, designed and simulated a cruise missile with a detachable booster and landing parachute. The missile features a realistic launch and recovery sequence, all modelled and animated within X-Plane. A custom plugin extension enables:

As part of my PhD in Robotics & AI at Federation University (May 2022 - Jun 2025), I established the Intelligent Drone Laboratory, the first indoor flight facility at the university, later featured on 7News and Federation University, from concept to fully operational testing and validation infrastructure. Built Brotor, a custom quadrotor research platform to support real-time trajectory planning research in cluttered environments.

Led a multidisciplinary team (software, hardware, operations) at Realtime Robotics to deliver an AI-powered vision-based navigation and object localisation system for UAVs from concept through integration, validation, and deployment, for agricultural applications and search-and-rescue operations.
A real-time system for human face identification integrating a spoof detection module, capable of discriminating between facial image presentations (e.g., printed or digital displays) and live human faces.

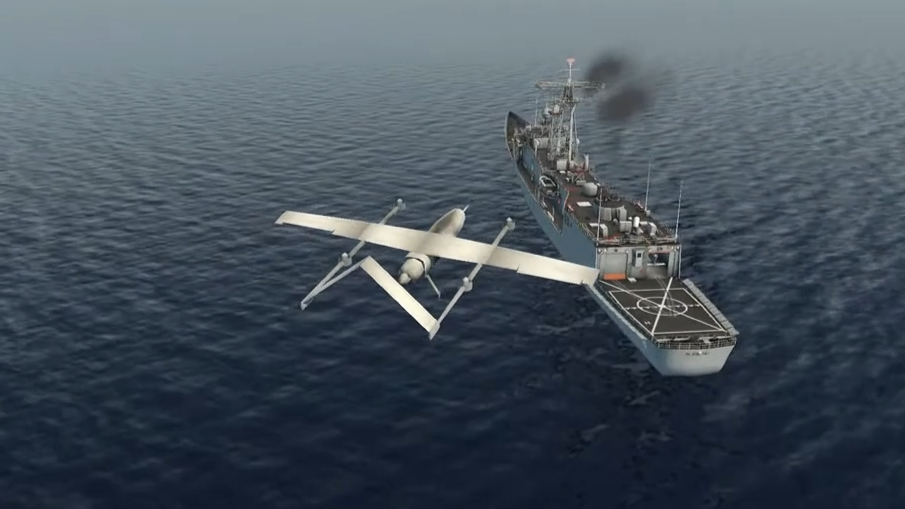
- Delivered complete production autopilot software stacks for multiple UAV configurations across product generations, with advanced GNC algorithms (EKF-based AHRS & GNSS/INS navigation) and flight autonomy features, including VTOL-to-Fixed-wing transition control and autonomous FDIR for critical scenarios such as GNSS jamming, sensor failure, and communication loss.
- Established & owned the organisation-wide simulation infrastructure (including SIL & HIL) for real-time flight software development, testing and validation. Delivered digital-twin models for all vehicle configurations across five years during my tenure at Viettel Aerospace Institute & Viettel High Tech (Aug 2017 - Jan 2022), including pan-tilt gimbal/tracker, quadrotor, VTOL quadplane, fixed-wing, folded-wing, and launcher/jet-assisted take-off UAVs across all product versions.
Joined the Aerospace Electronics Laboratory at Hanoi University of Science and Technology (HUST) as Research Assistant and UAV Team Lead (Aug 2014 - Jan 2022). Led research on stability and control algorithms for various aerial vehicle configurations, and mentored junior researchers on aerial systems, embedded development, and scientific writing.