Autopilot Software Developer & Flight Simulation Lead | Viettel
Aug 2017 - Jan 2022

Author
Binh Nguyen
Aug 10, 2017
- Delivered complete production autopilot software stacks for multiple UAV configurations across product generations, with advanced GNC algorithms (EKF-based AHRS & GNSS/INS navigation) and flight autonomy features, including VTOL-to-Fixed-wing transition control and autonomous FDIR for critical scenarios such as GNSS jamming, sensor failure, and communication loss.
- Established & owned the organisation-wide simulation infrastructure (including SIL & HIL) for real-time flight software development, testing and validation. Delivered digital-twin models for all vehicle configurations across five years during my tenure at Viettel Aerospace Institute & Viettel High Tech (Aug 2017 - Jan 2022), including pan-tilt gimbal/tracker, quadrotor, VTOL quadplane, fixed-wing, folded-wing, and launcher/jet-assisted take-off UAVs across all product versions.
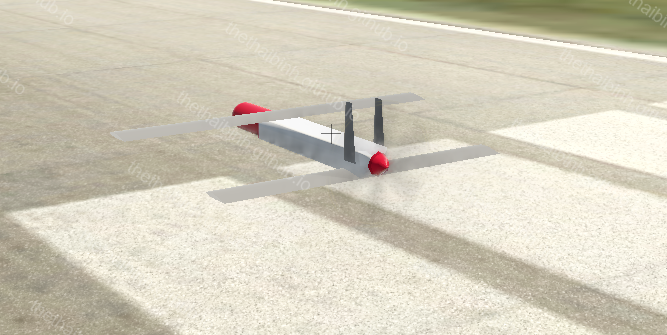
2017 - H-tail Fixed Wing UAV


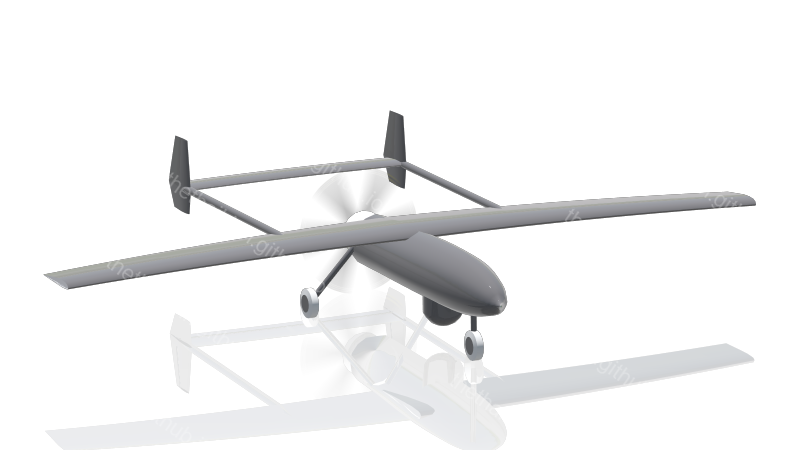
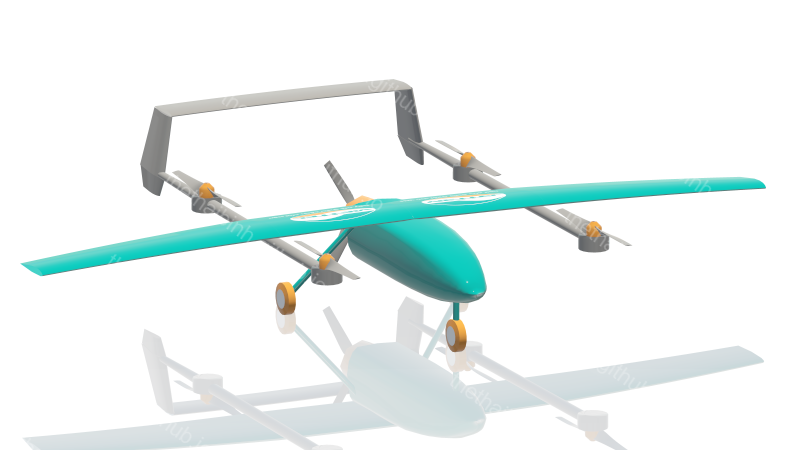
2018 - Inverted V-tail VTOL QuadPlane v1



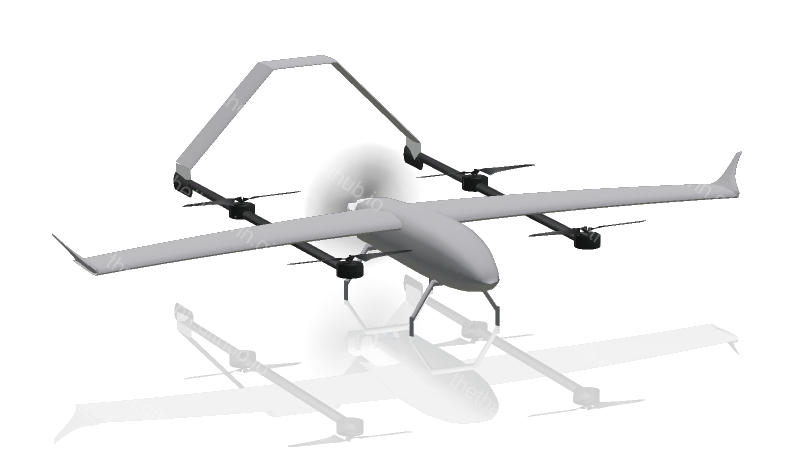
2019 - Inverted V-tail VTOL QuadPlane v2


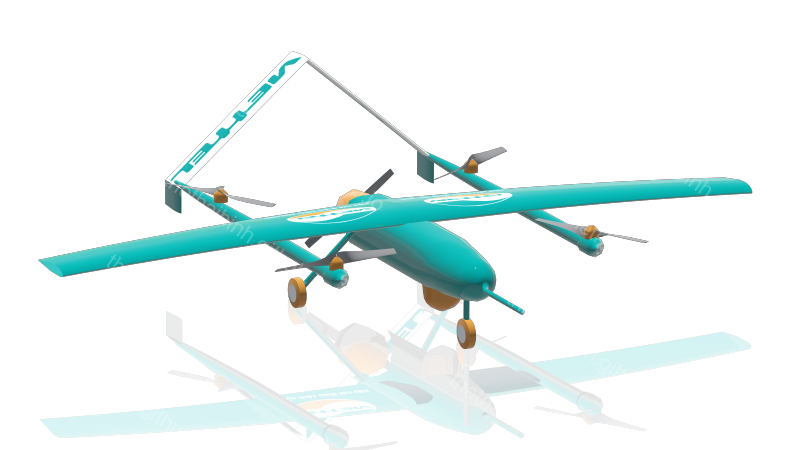
2020 - U-tail VTOL QuadPlane



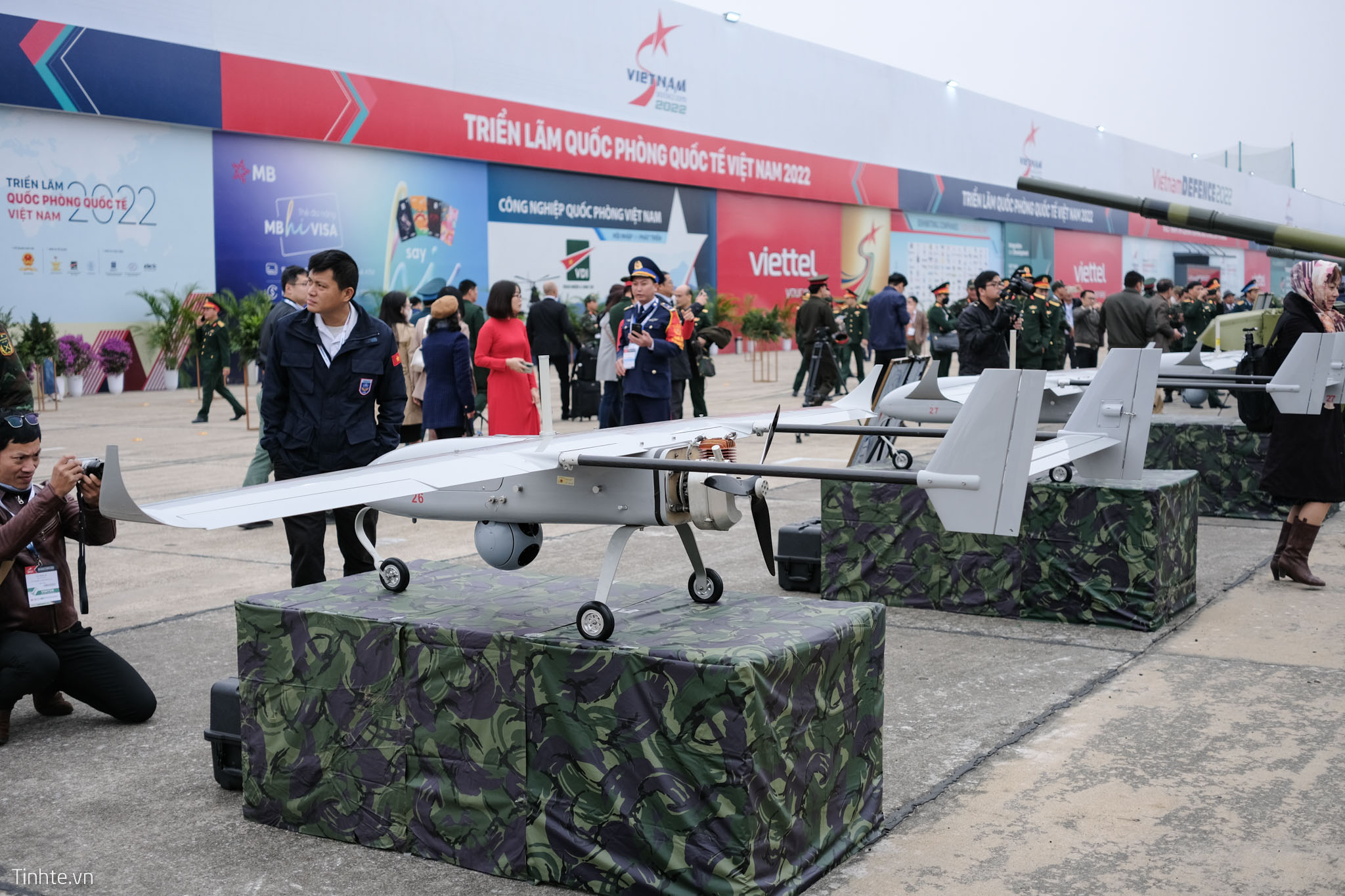
2021 - Fixed Wing (Loitering Munition)