
Fly-by-Voice: Autonomous Navigation with Natural Language Commands & Deterministic Safety
Author
Binh Nguyen
Jan 30, 2026
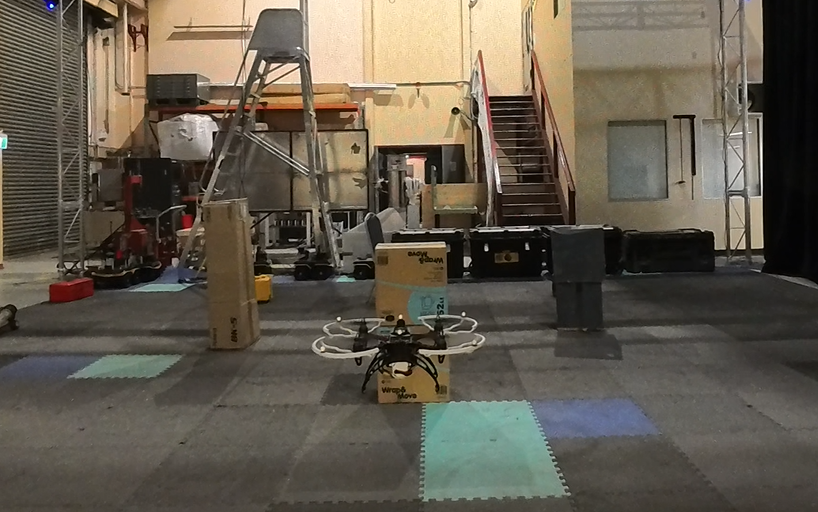
Developing a Vision-Language Model (VLM) guided autonomous navigation framework with deterministic safety guarantees. The system enables a quadrotor to fly to semantic goals inferred from natural language commands, for example, “Fly to the green barrel!”, while navigating safely through cluttered environments.
All capabilities demonstrated in real flight tests, including obstacle avoidance and traversing complex courses.