

Leading system development for a decentralised drone swarm framework for Defence applications at UNSW Canberra, with end-to-end responsibility from architecture through integration, testing, deployment, and handover to industry stakeholders.
- Architected a modular, scalable software stack using ROS2, enabling reusable integration across navigation, perception, communication, and task allocation subsystems with CI/CD pipelines from simulation to real hardware
- Built and maintained a full-stack containerised simulation and digital-twin infrastructure (ROS2, NVIDIA Isaac Sim) for development, system-level integration testing, and deployment-readiness validation
- Led cross-discipline system integration across embedded software, hardware, sensor payloads, localisation systems, and communication links, identifying failure modes and subsystem interaction issues through structured ground and flight testing
- Designed swarm testing scenarios and validation procedures, operational safety protocols, and human-swarm interaction interfaces; mentoring engineers on simulation and validation workflows
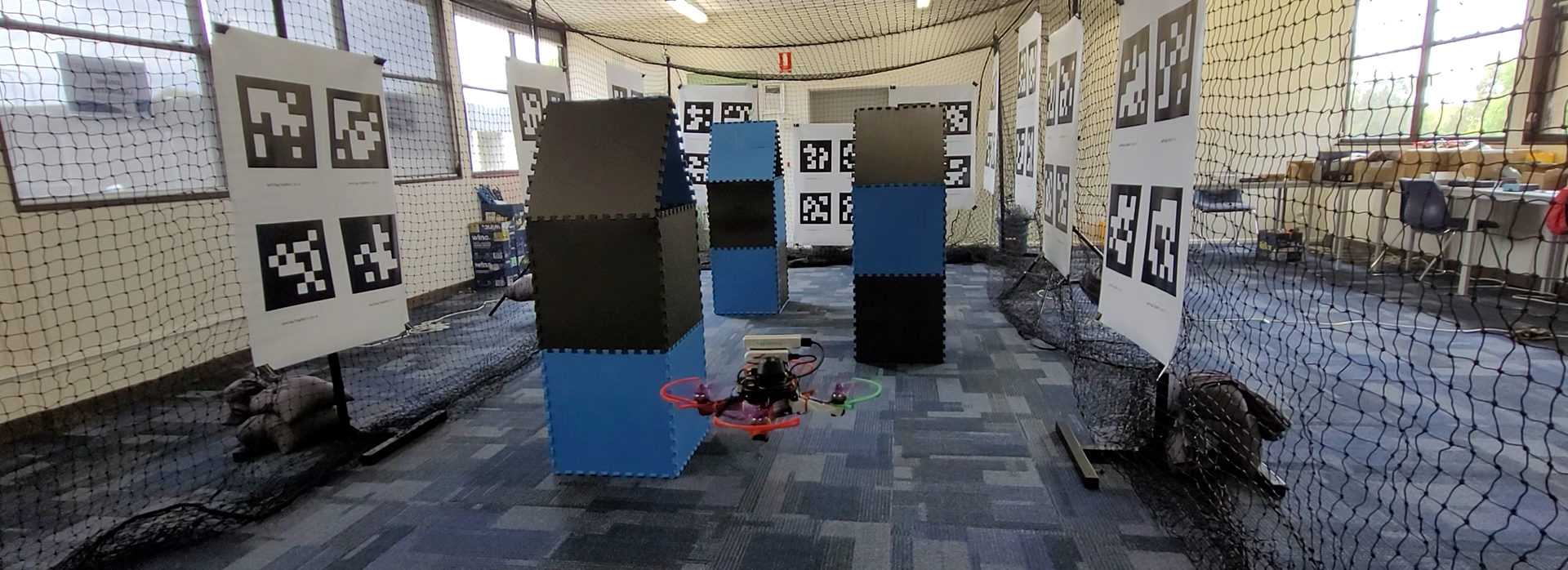
- Designed, procured, built, and successfully flight-tested a complete experimental quadrotor platform from scratch within three months at UNSW Canberra, demonstrating rapid iterative build-test-refine cycles.
 Successfully conducted first indoor flight test.
Successfully conducted first indoor flight test.
Related posts

Embedded Software Engineer | Swoop Aero
Developing mission-critical flight software for production autonomous drone platforms (1.6M+ items delivered, 6.0M+ people served globally) on Embedded Linux at Swoop Aero, within an Agile development team with rapid iterative development and rigorous validation standards for deployment readiness.
Featured on 7News - Indoor Flight Lab for Advanced Aerial Robotics
The Intelligent Drone Laboratory and Brotor research platform were featured on 7News and Federation University Australia.

Autopilot Lead Engineer | Realtime Robotics
Led a multidisciplinary team (software, hardware, operations) at Realtime Robotics to deliver an AI-powered vision-based navigation and object localisation system for UAVs from concept through integration, validation, and deployment, for agricultural applications and search-and-rescue operations.