

Led a multidisciplinary team (software, hardware, operations) at Realtime Robotics to deliver an AI-powered vision-based navigation and object localisation system for UAVs from concept through integration, validation, and deployment, for agricultural applications and search-and-rescue operations.
Tracking ground vehicle by quadrotor
Implemented moving ground vehicle identification, tracking, and homing by a quadrotor, including target selection, localisation, and pursuit of targets moving at 7 m/s.
Table of Contents
Related posts

Building Brover - Intelligent Ground Robot
Named following the same principle as its aerial sibling Brotor, Brover (combining “Bro” for Brother and “rover”) is a ground robot designed with commercial applications in mind.
Fly-by-Voice: Autonomous Navigation with Natural Language Commands & Deterministic Safety
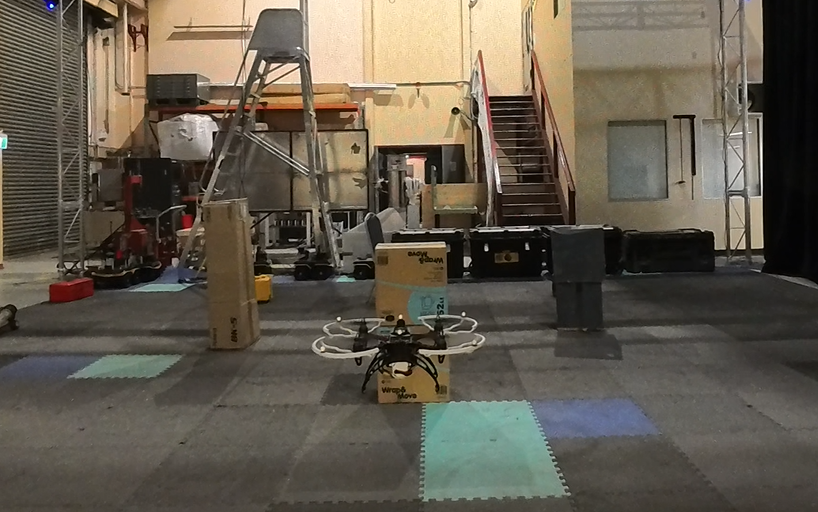
Developing a Vision-Language Model (VLM) guided autonomous navigation framework with deterministic safety guarantees. The system enables a quadrotor to fly to semantic goals inferred from natural language commands, for example, “Fly to the green barrel!”, while navigating safely through cluttered environments.
UAV Team Lead | ASE Lab @ HUST (Vietnam)
Joined the Aerospace Electronics Laboratory at Hanoi University of Science and Technology (HUST) as Research Assistant and UAV Team Lead (Aug 2014 - Jan 2022). Led research on stability and control algorithms for various aerial vehicle configurations, and mentored junior researchers on aerial systems, embedded development, and scientific writing.